
Projects
ProbeFly | Principal Investigator
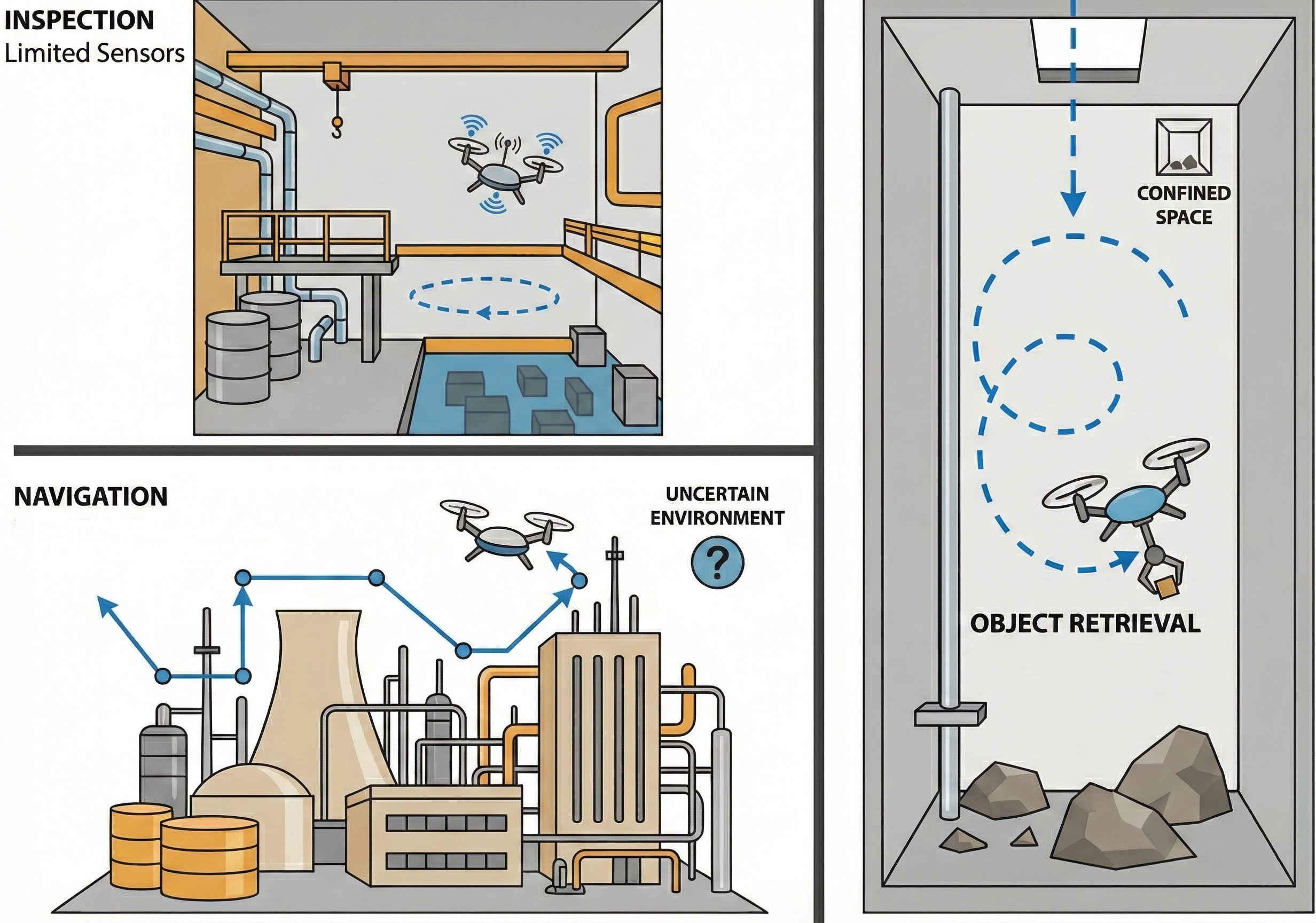
ProbeFly: Minimal-Sensor Micro-UAVs for Adaptive Nuclear Confined Space Exploration. The project develops micro-UAV autonomy for confined and degraded nuclear environments with minimal sensing, focusing on in-situ learning-based adaptation under uncertainty and partial observability.
Funding Source: RAICo; UK Atomic Energy Authority (UKAEA)
Amount: GBP £10,000
RAICo | Co-Investigator
Suppressing Task-Space Vibrations in Robotic Manipulators on a Flexible Platform. The project targets vibration-aware planning and control for long-reach robot manipulation on flexible bases, enabling safer, faster task execution and improved stability in nuclear decommissioning scenarios.
Funding Source: RAICo; UK Atomic Energy Authority (UKAEA); Sellafield Ltd.; Nuclear Decommissioning Authority (NDA)
Amount: GBP £150,000
AMPI | Key Researcher
Development of safe learning for manipulator with soft-rigid end-effector. The work investigates safe learning-based control and compliant manipulation using soft-rigid end-effectors, combining data-efficient adaptation with safety constraints for real-world deployment.
Funding Source: UKRI; National Physical Laboratory (NPL); Advanced Machinery and Productivity Initiative (AMPI)
Amount: GBP £22,600,000

LongOps | Key Researcher
Challenge 3: Modelling and control of a long flexible manipulator; Challenge 4: Teleoperation with Digital Twins. Under the SBRI digital technologies program for robotic nuclear decommissioning, this work advanced modeling, trajectory planning, vibration suppression, and digital-twin-enabled teleoperation for safer remote operations.
Funding Source: UK Atomic Energy Authority (UKAEA); SBRI - Digital technologies for robotic nuclear decommissioning
Amount: GBP £300,000
RAIN and RAIN+ | Key Researcher
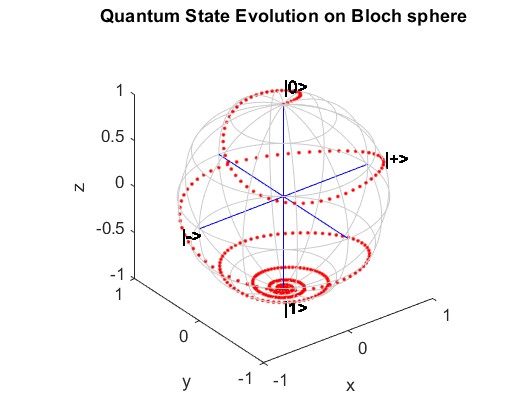
Robotics and Artificial Intelligence for Nuclear (RAIN) and RAIN+. Proposed a reinforcement-learning-based control approach for two classes of optimal pure state transition problems for closed quantum systems: i) when the target state is an eigenstate, and ii) when the target state is a superposition pure state.
Funding Source: EPSRC
Amount: GBP £12,800,000 (RAIN); GBP £1,980,000 (RAIN+)
ADAPT-IT | Key Researcher
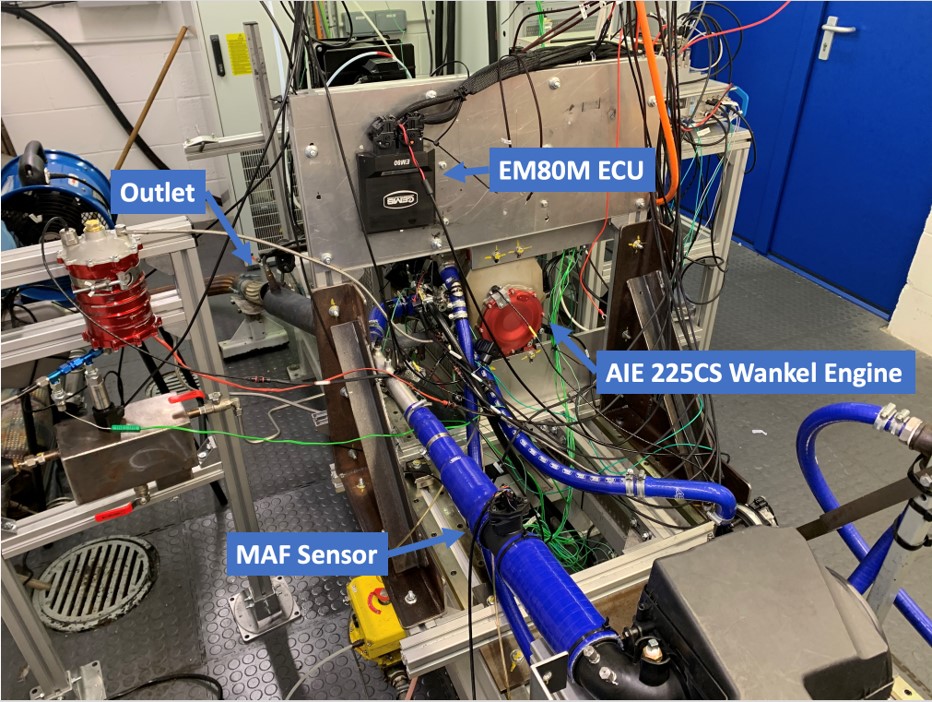
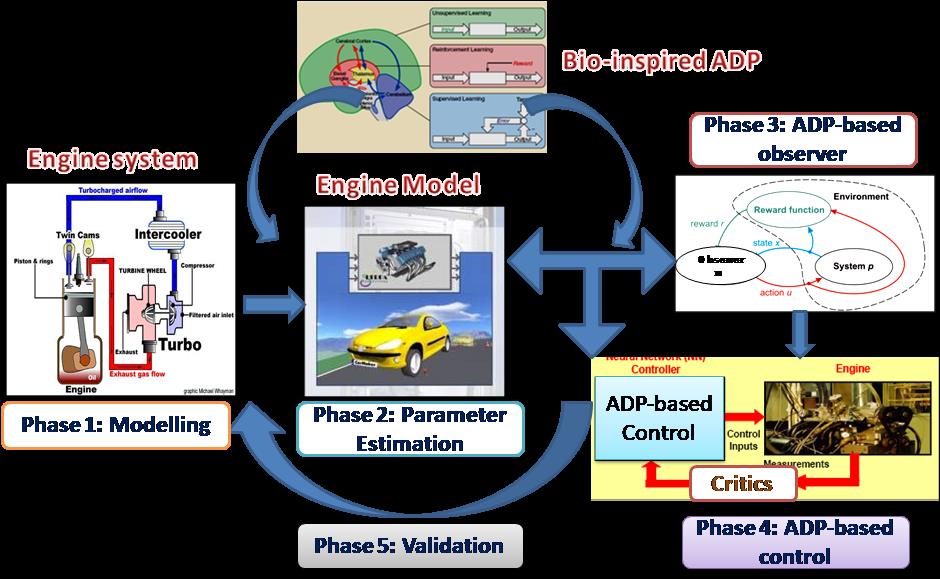
Reducing vehicle carbon emissions through development of a compact, efficient, and intelligent powertrain. The project developed adaptive estimation and learning-based optimal control methods for engine and powertrain systems, improving performance and emissions robustness under uncertainty and transient operating conditions.
Funding Source: Advanced Propulsion Centre (APC) UK
Amount: GBP £3,900,000
AECE | Key Researcher
Adaptive optimal estimation and control for automotive engine systems with approximate dynamic programming. Investigated adaptive optimal control and reinforcement learning for engine systems, combining estimation, stability analysis, and real-time learning toward practical implementation.
Funding Source: EU FP7 Marie-Curie Fellowship
Amount: EUR €231,000
Business, Commercialization, and Outreach
- RoboGlove (Founder): Innovation Award (£2,000) from Innovation Academy, The Masood Entrepreneurship Centre (MEC), and Alliance Manchester Business School (Alliance MBS);
- J2W (Co-Founder, ex-CFO): £700,000 turnover in 2023;
- Outreach: Exhibition Award £3,000 at Renold Innovation Hub, ID Manchester, from Innovation Academy; £1,000 outreach award in Faculty of Engineering, University of Bristol.